
Table of Contents
题目
分析
本题有很大部分和P1205:方块转换类似,都需要对一个矩阵进行顺时针/逆时针转90度的操作。不同之处在于,本题只要转一部分,但是代码是可以借鉴的。
回顾P1205的旋转算法
void rotate90(char src[N][N], char dst[N][N])
{
for (int i = 0; i < n; i++)
{
for (int j = 0; j < n; j++)
{
dst[j][n - i - 1] = src[i][j];
}
}
}在本题中,显然受影响(需要旋转)的矩阵范围变了,从0 -> n变成-r -> +r,因此坐标计算有了变化。我们可以沿用P1205的绝对坐标转换,但可以更方便地用相对坐标转换。
对于以(x,y)为中心、半径为r的子矩阵:
- 子矩阵范围:
[x-r, x+r] × [y-r, y+r] - 子矩阵大小:
(2r+1) × (2r+1) - 子矩阵的"左上角"在
(x-r, y-r)
将绝对坐标(i,j)转换为子矩阵内的相对坐标:
local_i = i - (x-r)local_j = j - (y-r)
应用P01205的旋转公式(子矩阵大小是2r+1):
new_local_i = local_jnew_local_j = (2r+1-1) - local_i = 2r - local_i
转回绝对坐标:
new_i = new_local_i + (x-r) = local_j + (x-r) = (j-(y-r)) + (x-r) = x-r+j-y+r = x+j-ynew_j = new_local_j + (y-r) = (2r-local_i) + (y-r) = 2r-(i-(x-r)) + (y-r) = 2r-i+x-r+y-r = x+y-i
最终公式:
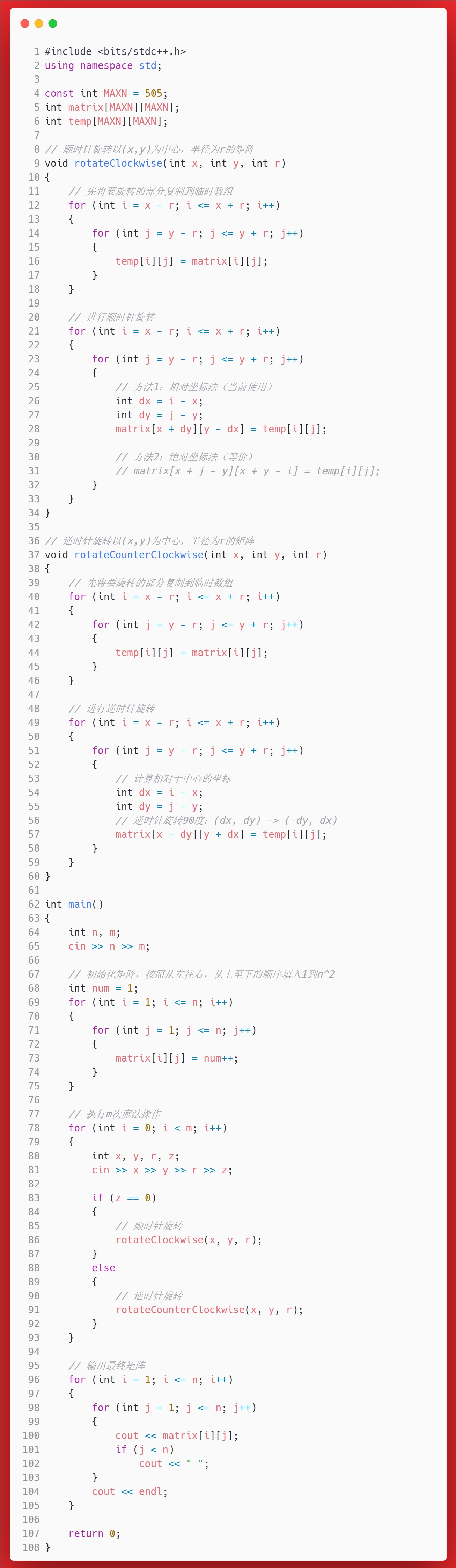
// 顺时针 90度
matrix[x + j - y][x + y - i] = temp[i][j];和我们的代码完全一样。
逆时针旋转的转换公式可以类似推导,不再重复。
有了这两个公式后,其他代码就简单了。
答案
思考
下面给出一些实现细节、边界情况与可选优化,供读者深入思考:
-
边界与坐标系:题中子矩阵以
(x,y)为中心、半径r,范围是[x-r, x+r] × [y-r, y+r]。实现时要明确使用的是0基还是1基下标,且在计算目标索引前务必保证下标落在矩阵合法范围内(避免负数或越界)。 -
局部临时区分原/目标矩阵:在一次旋转操作内,如果直接在原矩阵上就地写入目标位置,会造成后续映射读取到已被修改过的值,导致错误。常见做法有两种:
- 把整个原矩阵或要旋转的
(2r+1)×(2r+1)子矩阵先拷贝到临时数组temp,再按映射公式把temp写回到matrix; - 或者按“层(layer)”的方式在原矩阵上就地旋转(每次沿四边移动并用一个临时变量保存被替代的值),这种方法在空间上更省(几乎\(O(1)\)额外空间),但代码更繁琐,需要小心索引与循环边界。
- 把整个原矩阵或要旋转的
-
复杂度说明:对半径为
r的子矩阵做一次完整的90°旋转,其工作量为\(O((2r+1)^2)\),若有q次操作,总复杂度大致为\(O(\sum (2r_i+1)^2)\)。在r较大或q较多时会比较耗时,必要时考虑如下优化:- 若题目允许批量操作合并或有结构化规律,可以尝试合并旋转或延迟执行;
- 若只需查询而不需频繁修改,可考虑维护变换历史并对查询时计算映射;不过这些策略都复杂且依赖题目具体约束。
-
数值与类型安全:在计算新坐标时使用诸如
x + j - y、x + y - i等表达式,确保中间计算不会越界(对于本题常规约束int足够),并尽量写成x + (j - y)这样的形式以减少阅读误解。 -
特殊情况测试:实现后请针对如下用例测试以防漏掉边缘情况:
r = 0(半径为 0,不发生变化);- 子矩阵贴边或角落(部分或全部落在边界);
- 多次对重叠区域的连续旋转,验证是否按预期顺序生效(若采用
temp拷贝法,应能自然得到正确顺序);
-
代码风格建议:
- 将坐标映射与边界检查封装成小函数(例如
map_clockwise(i,j,x,y,r)),主逻辑只负责遍历和读写; - 在单次旋转中推荐使用一个大小为
(2r+1)×(2r+1)的临时缓冲区来存放被读出的原值(代码更直观、更不易出错)。
- 将坐标映射与边界检查封装成小函数(例如
这些思路既能帮助你写出正确的实现,也有助于在遇到性能或边界问题时快速定位与改进。